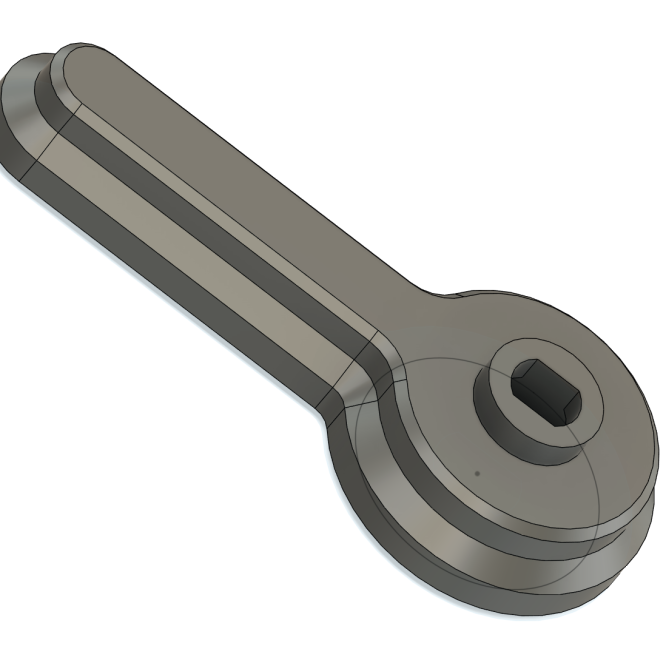
Bathtub Handle
This is a replacement knob/handle for a standard bathtub I made. Why? Because it was too hard for Emma to
create something amazing
These are the final or in-progress products of things.
This is a replacement knob/handle for a standard bathtub I made. Why? Because it was too hard for Emma to

Remix of the Spaceman into one of my favorite childhood toys. This design was very tedious, but pretty easy because

Remix of the Spaceman of the infamous DJ duo! The helmets were a bit tricky to make because they had

Guys. We’re in the middle of a global pandemic here (Covid19). There is a shortage on toilet paper, PPE and

I love my kamado! I’ve been wanting to design a custom bbq table for it because the old table didn’t
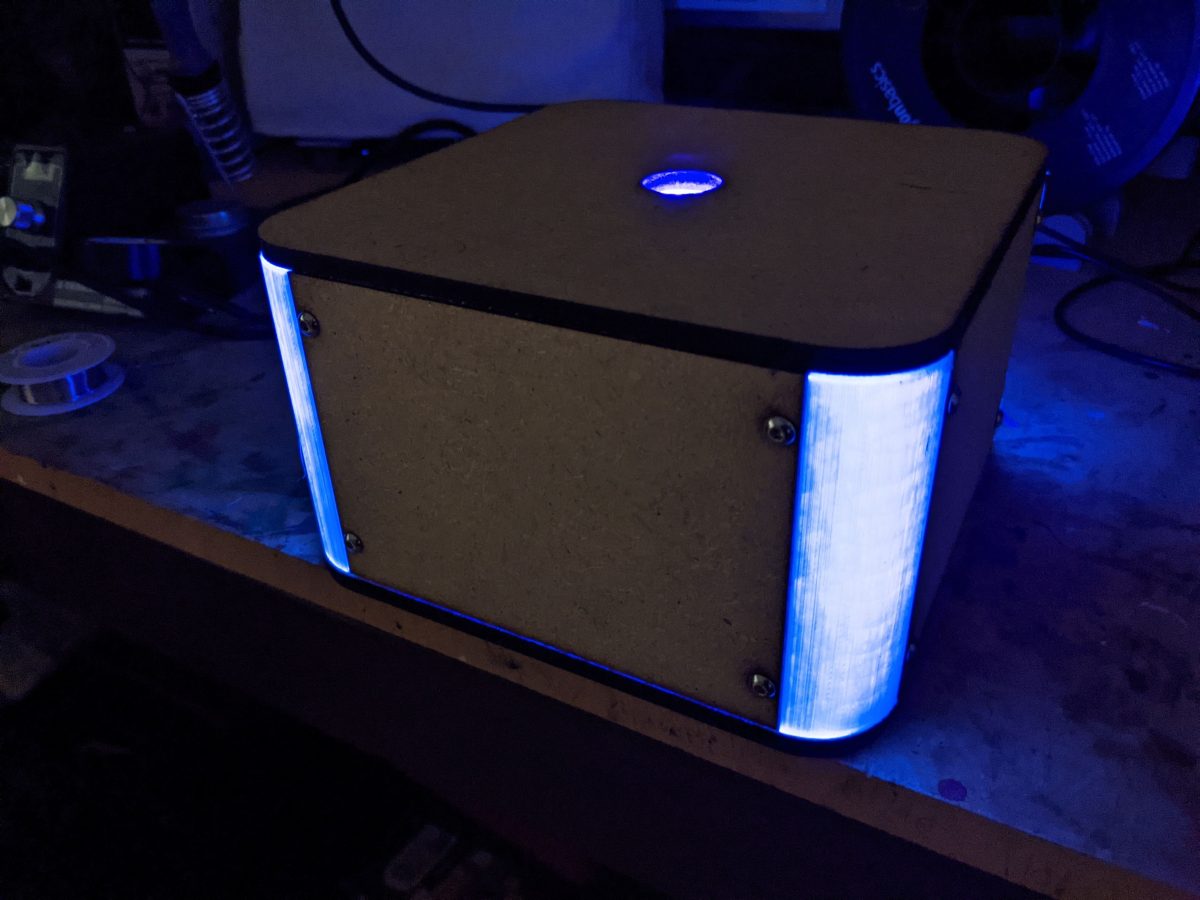
I created a little UV curation station/enclosure using a 405nm LED strip, MDF, and some clear PETG for some style!
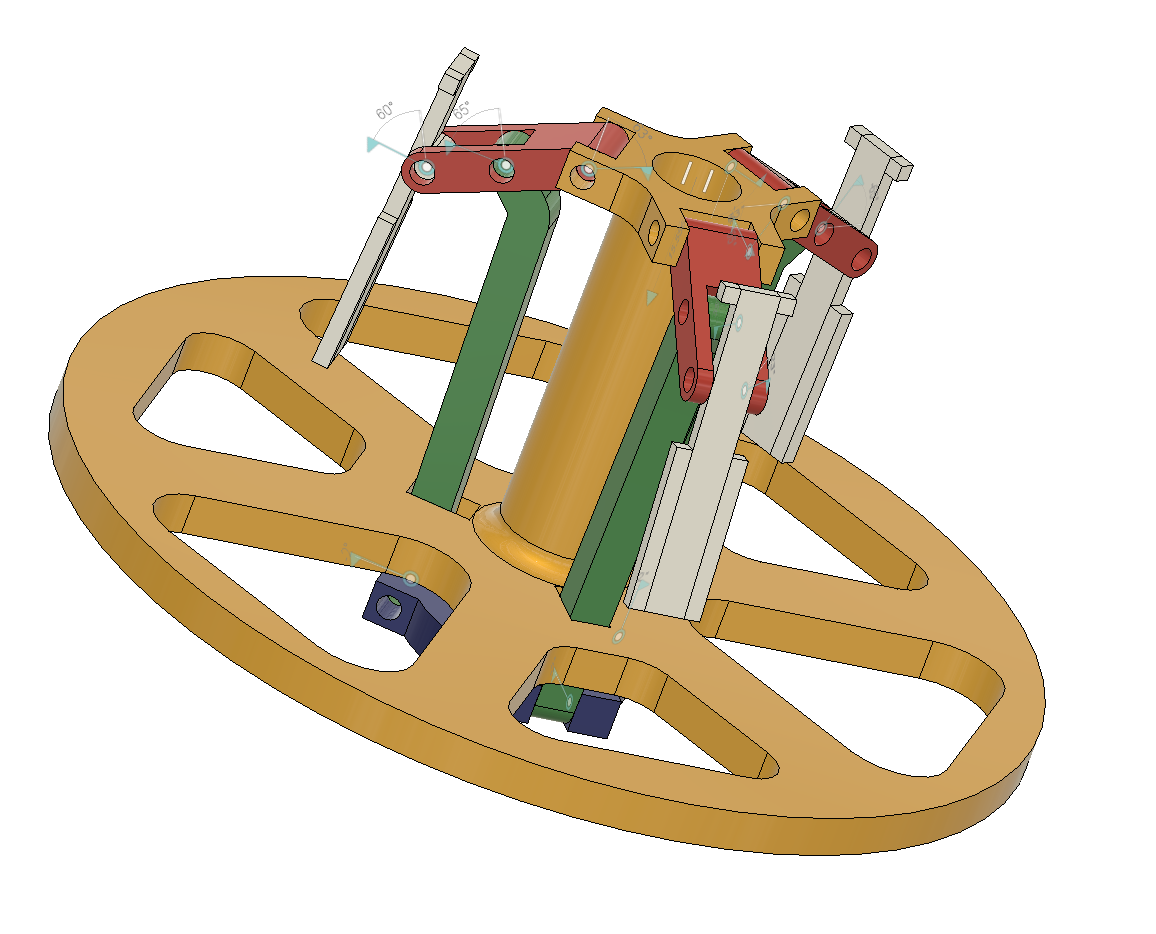
I’ve been building my own CNC machine this year, and slowly designing parts to go with it. I needed a
There are many spool holders out there. The problem is there are many spool sizes that makes it hard to

Not sure why, but I wanted to create my own street light. It features LEDs, an ESP8266 microcontroller with WiFi

Emma’s paint collection is getting pretty big. It was impractical to find colors in her basket, so I decided to